

人机协作时代,谁来守护“安全”底线?南林学生团队给出新答案
欢迎订阅《信阳手机报》移动用户发送短信 XYSJB 到10658300即可开通 3元/月 不收GPRS流量费
当机器人走出实验室,进入家庭、工厂和日常生活,一个核心问题变得无法回避:如何让机器人在有力的同时,又不失分寸?
传统机器人关节大多依赖电机驱动,遇到紧急情况时要么紧急刹车,要么依靠视觉系统提前制动。这种“刚柔难以共济”的被动安全特性,在与人近距离协作的场景中,潜藏着不容忽视的风险。近日,一支学生创业团队在磁流变柔顺执行器技术上取得突破,尝试从物理层面为人机协作提供一种“本质安全”的新思路。
起初是一则新闻引起了他们的注意:某商场内一台展示中的机器人与清洁工意外碰撞,导致人员跌倒。由此引出的话题里,有人质疑机器人安全性,有人感叹技术进步必经阵痛。而团队的研究方向正与它相似——探究如何实现机械的“刚柔共济”。
从场景出发:找到真正的痛点
这支团队由南京林业大学机械电子工程学院的硕士生和本科生组成,专注机器人关节技术研发已有近两年时间。
“我们最初的设想比较简单,就是做一个性能更好的执行器。”团队学生负责人李仕伟回忆道。在2024年底,团队带着初步方案走访了多家企业和机构,反馈让他们重新思考了方向。
他们发现,问题并不仅仅只停留在“安不安全”这个层面。
今天的协作机器人普遍配备了急停按钮、碰撞检测、视觉避障等多重安全措施。这些技术手段确实有效避免了重大安全事故的发生。但在实际应用中,团队很快就发现了一个行业普遍存在的“隐形代价”:
“现在机器人为了安全不得不牺牲部分效率。”一位工程师道出了行业的普遍困境,“一旦有什么情况,就得降速、停下、提前避让——安全是保住了,但产线效率也有了不可避免的损失。”
“一有点风吹草动就停,机械频繁中断、重新启动,效率大打折扣,磨损也增加了。” 另一位企业负责人也直言不讳。
这些反馈让团队意识到,行业现状并非“不安全”,而是正陷入“安全与效率难以兼得”的两难困境。现有的安全策略,本质上是用性能换安全,无法满足人机深度协作的需求。
在需要与人近距离接触的场景中——无论是康复训练、服务机器人帮助老人起身,还是外骨骼助力——这个问题更加突出。这些场景无法通过围栏或距离来保障安全,机器人必须与人直接接触。发生碰撞时,现有的“被动安全”策略只能“事后响应”,无法做到真正的“碰前卸力”。而一旦算法系统出现异常故障,就有可能对人以及相关物品造成不可挽回的损失。

图1团队在车间参观

图2团队在博览会上调研
团队意识到,真正的突破口不是“性能更强”,而是从被动安全转向主动柔顺。2025年初,团队开展了近50次专家研讨和大量文献研究,最终将技术方向锁定在磁流变液智能材料上。
技术路径:从物理层面实现“本质安全”
团队发现,市面上绝大多数执行器都面临同一个问题:依赖软件检测和算法响应来保障安全,存在天然的延迟风险。
行业常见的响应时间在75毫秒左右。看似很短,但在人机近距离协作的场景下,这75毫秒足以造成伤害。更关键的是,这种安全机制是“被动”的——系统正常时还好,一旦软件异常或检测延迟,刚性出力就很有可能伤及使用者或者造成财产损失。
这支团队另辟蹊径,他们没有在“软件报警”上继续堆叠功能,而是回到最底层——用材料特性重新设计关节。
团队的核心技术是磁流变柔顺执行器。磁流变液是一种智能材料,在磁场作用下,可以在毫秒级时间内从液态变为类固态。利用这一特性,团队设计出了“柔顺”执行器:一旦检测到碰撞,执行器瞬间柔顺,从物理层面实现对人和机器的双重保护。
“我们希望机器人既能高效,又能实现安全性的提升。” 李仕伟说,“这不是在已有方案上修修补补能解决的,需要从关节层面重新设计。”
围绕这一方向,团队自主研发了三大核心技术:第一,融入磁流变液,创新执行器结构。 这一设计使执行器的响应时间缩短至15毫秒,同时实现了刚度与阻尼的无极调节,碰撞瞬间可主动卸力,安全性能提升了79%。第二,优化磁路设计,提升转矩稳定性。 优化后,工作区域平均磁感应强度提升35.2%,最大传递转矩提升1.85倍。团队还建立了高精度EMEC等效磁路模型,将仿真计算时间从传统方法的5.8小时缩短至0.5秒,预测结果与实际误差仅3%。第三,自研MH-ADRC控制算法,实现精密力控。这能实现0.1%的高精度渐近跟踪控制,并且动态工况下力跟踪误差控制在3%以内,最小力分辨率达0.1N。
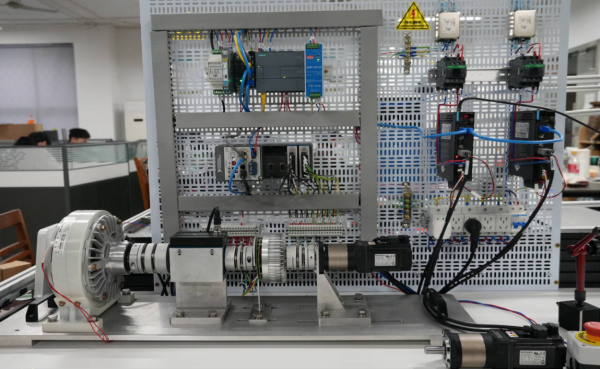
图3实验平台
应用场景:人与机器安全协作
2025年底,团队完成了中试阶段验证,多台样机连续运行稳定。目前,该执行器的力矩覆盖范围从0.8N·m到59.5N·m——小到拧动矿泉水瓶盖,大到辅助搬运重物,均可覆盖。
在应用场景上,团队聚焦于两个方向:人机协作方面,在需要人与机器人近距离协同作业的场景中,提供安全的物理交互保障;关于生活服务,助老机器人、家务机器人等,在帮助老人起身、搬运物品时,实现柔顺助力。
“这些场景的共同特点是:机器人与人没有安全距离,必须直接接触。”负责人李仕伟说,“我们的技术,正是为这样的场景设计的。”
从实验室到市场
目前,该团队已注册公司,相关技术获多项专利认可,正在推进与多家企业的合作落地。
谈及未来,团队负责人李仕伟表示:“我们希望,未来陪伴在人们身旁的机器人不再是冷冰冰的机器,而是能够温柔协作的人类助手。让机器人既有力气,又不失分寸。”
 文章投诉热线:156 0057 2229 文章投诉邮箱:291 3236@qq.com
文章投诉热线:156 0057 2229 文章投诉邮箱:291 3236@qq.com
标签:
- 上一篇:选企有方,综合实力与业主口碑双轨验证:2026年度上海装修公司10家推荐清单
- 下一篇:没有了
 报晓风
报晓风 信阳日报微信
信阳日报微信 掌上信阳微信
掌上信阳微信 信阳日报新浪微博
信阳日报新浪微博 信阳日报腾讯微博
信阳日报腾讯微博
请您文明上网、理性发言,并遵守相关规定。网友评论
网友评论仅供其表达个人看法,并不表明信阳新闻网立场。

